Image Saliency and Spacecraft Pose Estimation
Revision Date: Oct 1, 2018
Contact: Jian-Feng dot Shi at carleton dot ca
Abstract
- Spacecraft pose estimation is a vital function of the navigation process.
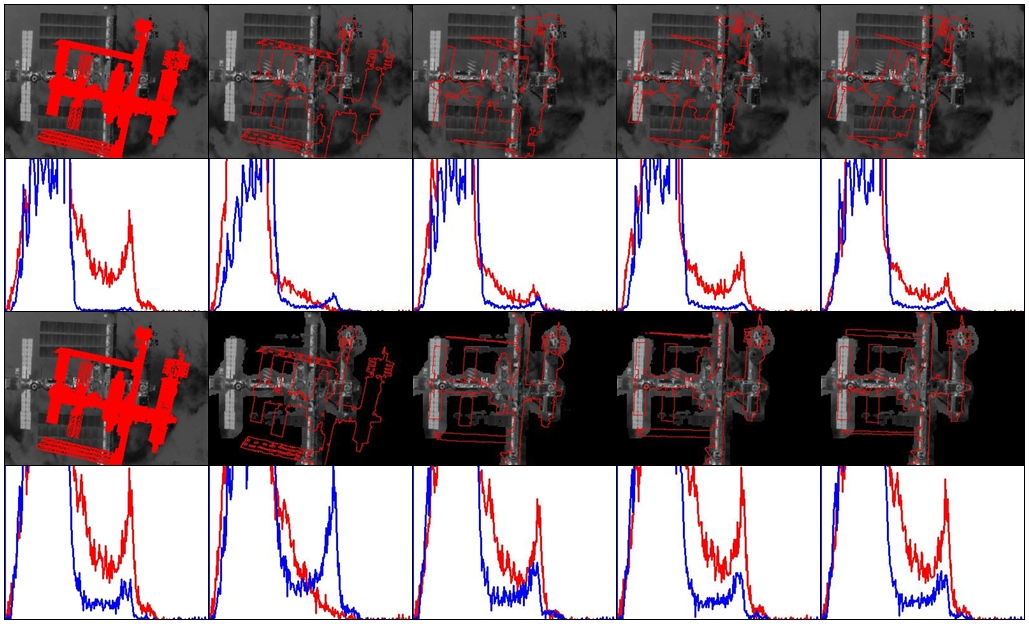
We introduce a regional approach combining Difference of Gaussian-based scene detection
and Graph Manifold Ranking (GMR) based foreground saliency extraction to build a prior
mask for the level-set region-based pose estimation.
Inspired by saliency principles of edge response and centre-surround, we introduce a
novel false-coloured high-frequency response image to maximise histogram distinctiveness
from the grayscale infrared image. Our saliency approach shows state-of-the-art performance
in precision and provides an order of magnitude reduction in processing speed from the
original GMR method.
We tested our method on synthetically generated ISS video sequence as well as laboratory
and flight images from the STS-135 mission captured by the TriDAR infrared camera.
Media Extensions
References
- If you are interested in using our work or our datasets, please reference our paper
- Shi, J.F., Ulrich, S., and Ruel, S., (2018)
"Regional Method for Monocular Infrared Image Spacecraft Pose Estimation".
AIAA Space Conf. and Exhibit, Proceedings of the,
Orlando, FL, September 17-19.
- @Inproceedings{Shi18_Regional,
author = {Shi, J.F. and Ulrich, S. and Ruel, S.},
title = {Regional method for monocular infrared image spacecraft pose estimation},
booktitle= {AIAA Space Conference and Exhibit, Proceedings of the},
year = {2018},
month = {Sept},
address = {Orlando, FL},}
Downloads
- Papers
- Video Datasets
- Image Datasets
- Links and Resources
- [Image Saliency Benchmarks]
- Salient image datasets (you may download a streamlined version of these datasets
directly from our website or access the original links)
|
|